How to make the life of armless better ?
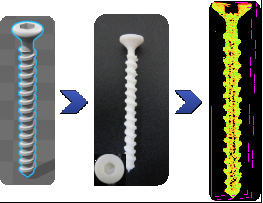
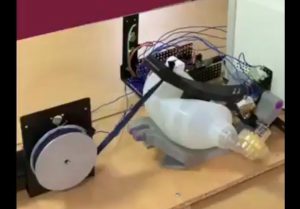
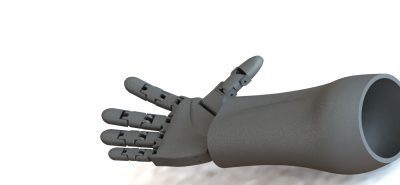
The main objective is to model a 3D printed bionic arm with motor and electronic circuits such that the arm could move in 7 different directions by brain signals. A 3D model is generated, enveloped and assembled using Solid works. All the motion and collision detection is analysed and then printed using Ultimaker bot. These parts are now filed and grinded wherever necessary and assembled. The respective tolerance for strings and motors are analysed and designed before printing. These stings are now connected with motors which when rotates, the corresponding finger would bend. Five motors are connected for five fingers. These S series servomotors are supplied from a 15V source. The input can be controlled by an arduino circuit. These inputs are gathered from EMG sensor which is connected with brain. With help of doctors, the EMG electrodes are inserted inside the respective muscle area, that will further sense the muscle movement. The signals from sensors is sent to another arduino board that converts muscle signals to proper amplified electrical signals and sends them to another arduino board circuit that is connected to motors which then facilitates the motion of fingers, wrist and elbow. This bionic arm will be fixed to an amputee.